Ground Motion Prediction Equations#
This chapter provides an overview of ground shaking intensity modeling based on empirical equations and describes the way GSIMs — more commonly known as ground motion models or Ground Motion Prediction Equations(GMPEs) — are implemented in the OpenQuake engine.
Introduction#
Ground shaking intensity models are empirical equations that - given a set of parameters - compute a value representative of the shaking intensity together with an associated variability. GSIMs have a fundamental importance in the overall PSHA architecture.
A ground shaking intensity equation can be schematised as follows (Al Atik et al., 2010):
where \(Y\) is the natural logarithm of a ground shaking intensity measure, \(X_{es}\) is the vector of explanatory (or independent) variables, \(\theta\) is the vector of model coefficients and \(\Delta\) is a random variable describing the variability of the ground shaking intensity at the site.
The selection of independent variables and the definition of the structure of the equation is usually done on the basis of physical principles and basic descriptions of the earthquake process, the latter intended as the combination of a rupture occurrence, the synchronous radiation of seismic waves and their propagation to the site.
Tectonic regionalisation#
The different properties of the ground-motion generated by earthquakes of comparable size but occurring in dissimilar tectonic regions (e.g. stable continental regions, subduction interface) are well recognized in the scientific literature (Abrahamson and Shedlock, 1997).
The OpenQuake engine computes hazard using Seismic Source Models(SSMs) which may include sources belonging to different tectonic regions. Each seismic source contains a label specifying the tectonic region to which it belongs. The OpenQuake engine automatically selects from the Ground Motion Model (GMM) the associated GSIM.
The assignment of each source to a specific tectonic region is habitually completed using a zonation map called tectonic regionalisation (see for example Delavaud et al., 2012).
Main predictor variables#
In the current section we offer a brief overview of the most important predictor variables supported by the OpenQuake engine (for general a summary, see Akkar et al., 2013).
The main predictor variables are organized into three categories as indicated in the table below variables describing the rupture properties, variables describing the rupture-site path and variables used to characterize the site conditions.
Principal predictor variables supported by the OpenQuake engine and corresponding groups.
Group |
Variables |
|---|---|
Rupture parameters |
|
Rupture-site distances |
|
Site parameters |
|
Magnitude
Moment magnitude (Hanks and Kanamori, 1979) is the magnitude typology preponderantly used within the most recent GSIMs and - as a consequence - within seismic hazard analysis in general. The OpenQuake engine, however, does not assume a predefined magnitude typology. It is up to the user to ensure that the magnitude used to define earthquake occurrence in the seismic source model is consistent with the one used in the selected ground shaking intensity models.
Dip
This is a parameter normally obtained from the source since it must be specified by default for the creation of almost all the source typologies supported by the OpenQuake engine.
Distance
The OpenQuake engine supports almost all the rupture-site distance metrics used by the most recent and complex ground shaking intensity models published in the scientific literature (see the table below for a comprehensive list). The calculation of distances within the hazard component of the OpenQuake engine is performed by assuming a spherical Earth with a radius of 6371.0 km.
Since earthquakes are always modeled in the OpenQuake engine as finite ruptures, all rupture-site metrics are always computed instantaneously. For this reason, the engine does not contain conversion equations between different metrics (see for example Scherbaum et al., 2004)
Rupture mechanism
Many GSIMs compute ground-motion using a categorical variable describing the rupture mecha- nisms (e.g. normal, strike-slip or reverse).
In the OpenQuake engine the rupture mechanism is specified in terms of the rake angle (defined according to Aki and Richards, 2002). Since the rake is not used directly as a predictor variable, most of the GSIMs implemented in the OpenQuake engine contain a mapping between the rake angle and the rupture mechanism classes supported by each specific model (for a review see page 24 of Akkar et al., 2013).
Time averaged shear-wave velocity in the uppermost 30m :math:`v_{s,30}`
Local site conditions and their effects on the ground-motion are routinely incorporated into ground shaking intensity models by means of a scalar quantity corresponding to the time-
Rupture-site distances supported by the OpenQuake engine.
Distance definition |
Symbol |
Description |
|---|---|---|
Epicentral |
\(R_{epi}\) |
Distance between the epicenter and the site. Notethat currently in the OpenQuake engine the hypocenter is assumed to be at the center of a rupture |
Hypocentral |
\(R_{hypo}\) |
Distance between the hypocenter and the site. Note that currently in the OpenQuake engine the hypocenter is assumed to be at the center of a rupture. |
Joyner and Boore distance |
\(R_{jb}\) |
Closest distance between the site and the surface projection of the rupture |
Closest distance to the rupture |
\(R_{rup}\) |
Closest distance between the site and the rupture surface |
Horizontal top-edge distance |
\(R_{x}\) |
Horizontal distance between the site and the top edge of the rupture |
Top-of-Rupture depth |
\(Z_{tor}\) |
Depth to the top edge of the rupture |
averaged shear wave velocity measured in the uppermost 30m of the soil column (\(V_{s,30}\)). Local site conditions in the OpenQuake engine are specified by means of this parameter.
In case of ground shaking intensity models which support the definition of local soil con- ditions through soil classes (e.g. hard rock, soft soil) their implementation is done in a way that given a value of \(V_{s,30}\) the corresponding soil class is used to compute the value of shaking intensity (provided that a mapping between soil classes and \(V_{s,30}\) is defined by the authors).
Additional parameters used to quantitatively describe local geology are the depths to the 1 km/s and 2.5 km/s shear-wave velocity interfaces. These are parameters used in some GSIMs (e.g. Chiou and Youngs, 2008) to capture the influence of the deeper local geological structure.
Depth to the top-of-rupture (\(Z_{tor}\))
The depth to the top of rupture is a parameter introduced in some of the NGA West 1 GSIMs such as the Chiou and Youngs (2008) and the Abrahamson and Silva (2008) in order to account for a supposed dependence of the shaking intensity to the depth of the source, as suggested by Somerville and Pitarka (2006).
Supported intensity measure types#
Each GSIM implemented in the OpenQuake engine provides a list of the supported Intensity Measure Types(IMTs). The first table below contains a comprehensive list of possible alternatives. The definitions of the ground-motion component supported are instead listed in the second table below.
Principal intensity measure types supported.
Acronym |
Description |
Unit of measure |
|---|---|---|
PGA |
Peak Ground Acceleration |
g |
PGV |
Peak Ground Velocity |
cm/s |
PGD |
Peak Ground Displacement |
|
SA |
Spectral Acceleration |
g |
IA |
Arias intensity |
|
CAV |
Cumulative Absolute Velocity |
|
RSD |
Relative Significative Duration (Trifunac and Brady, 1975) |
|
MMI |
Modified Mercalli Intensity |
Principal ground-motion components supported
Component |
Description |
|---|---|
HORIZONTAL |
General horizontal component (this definition is usually adopted when a more precise definition of component of motion modelled is missing) |
GEOMETRIC_MEAN GMRotI50 |
Geometric mean of spectra of x and y compo- nents Median value of the (period independent) geo- metric mean (Boore et al., 2006) |
RotD50 |
Median value of the (period dependent) geometric mean (Boore, 2010) |
RANDOM_HORIZONTAL |
Random horizontal component |
VERTICAL |
Vertical component of ground-motion |
Implementation and use of GMPEs in seismic hazard analysis#
The OpenQuake engine contains a large set of GSIMs developed for different tectonic regions. Currently the engine includes GSIMs for shallow earthquakes in active tectonic regions, earthquakes in stable continental regions, subduction regions and geothermal areas.
GSIMs are implemented following a template model (in the Python jargon a base class) which defines the basic behaviour and describes the principles to be followed for their implementation. Each GSIM contains a definition of the independent parameters used to describe the rupture, the site conditions, the rupture-site distance metrics, the intensity measure types supported, the type of standard deviation provided, the tectonic region where the use of the GSIM is recommended. The main advantage of this approach is that GSIMs, no matter which are their specific properties or features, behave following a common protocol. For example, this feature allowed the creation on top of the GSIM library of a universal testing procedure, which is applied to all the models implemented in the OpenQuake engine in order to guarantee a uniform testing level (see following section for additional information on this topic).
A second advantage of the developed library relates to its flexibility and modularity. Once the properties of the main objects are defined, GSIMs can be used interchangeably. For example, the OpenQuake Ground Motion Toolkit (Weatherill, 2014) builds on top of this library and provides tools for computing residuals given a dataset of recordings, or for the calculation of trellis plots that compare the scaling of multiple GMPEs side by side in terms of magnitude, distance, site-condition, spectra etc.. Figure 4.1 shows the scaling of ground-motion versus magnitude for some of the GSIMs implemented in the OpenQuake engine. The ground motion is computed for a site at a \(R_{jb}\) distance of about 33 km with \(V_{s,30}\) equal to 760 m/s from a rupture with a strike of dip of 45 degrees toward south for two different values of rake (i.e. rupture mechanism). The upper panel of the figure below shows the position of the site and the rupture. Note that the three GSIMs selected use different rupture-site metrics.
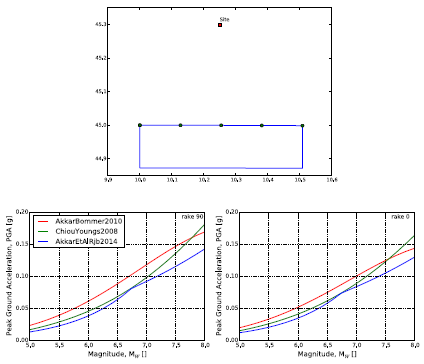
(upper panel) Simple schematic with the surface projection of the rupture and the site (red square) used in this example. The green dots show the position of the top of rupture. (lower panels) Scaling of Peak Ground Acceleration as a function of magnitude obtained by some of the GSIM implemented in the OpenQuake engine.#
Testing#
The progressively increasing complexity of ground shaking intensity models is giving more and more emphasis and relevance to the validation of results provided by the GSIMs implemented within PSHA codes and the results of original GSIM implementations as described in the scientific literature (or directly provided by the authors).
The standard process adopted for the implementation in the OpenQuake engine of a ground shaking intensity model requires a set of verification tables each one containing values of ground-motion (or standard deviation) computed using a large number of combinations of the predictor variables. The table below shows a simplified example of a GSIM verification table; it consists of: a header line with (standard) names for each column and a number of lines each one containing values of the predictor variables plus the computed values of ground-motion intensity or standard deviation. Examples of verification tables are available in the OpenQuake-hazardlib Github repository.
Schematic of a GSIM verification table used in the OpenQuake engine.
M |
R |
\(V_{s,30}\) |
\(IMT_1\) |
\(IMT_2\) |
… |
|---|---|---|---|---|---|
\(val_{1,1}\) |
\(val_{1,2}\) |
\(val_{1,3}\) |
\(val_{1,4}\) |
\(val_{1,5}\) |
|
\(val_{2,1}\) |
\(val_{2,2}\) |
\(val_{2,3}\) |
\(val_{2,4}\) |
\(val_{2,5}\) |
|
… |
Using these tables and an automated verification procedure implemented in the OpenQuake engine, it is possible to verify the consistency between the original results and the corresponding values computed with the version of the GSIM implemented. On average we accept discrepancies between the original implementation and the version included in the OpenQuake engine lower than five percent.
GEM recommends that contextually to the publication of GSIMs the table of coefficients as well as of a set of verification tables (or a software which allows the generation of these tables) are published as an electronic supplement. This can certainly improve the reproducibility of the models proposed and most of all would increase the quality and robustness of the computed hazard.
Spatial correlation of ground motion#
The current literature (Bazzurro and Luco, 2005; Crowley and Bommer, 2006; Park et al., 2007) clearly explains the necessity for considering spatially correlated ground motion fields in the calculation of losses for a portfolio.
The OpenQuake engine supports the calculation of ground-motion fields taking into account the spatial correlation of the within-event residuals (Boore, 2003). The OpenQuake engine supports correlation models developed according to a default scheme. Currently the OpenQuake engine provides only one correlation model, the one proposed by Jayaram and Baker (2009). The calculation of spatially correlated ground motion fields is summarized under event-based PSHA section.
Future developments#
The current implementation of GSIMs into the OpenQuake engine offers advanced features but - accord- ing to experience and feedback received from users - it partially lacks of flexibility and should provide an easier process for the incorporation of new GSIMs. A revision of the current scheme adopted for the implementation of new GSIMs will be therefore necessary in order to address the suggestions and feedback we received so far and add new features.
An incomplete list of the possible improvements that might be introduced is the following one:
Better support for GSIMs defined via tables
This is a request we received from different experts. Technically it is already possible to create GSIM from tables (see for example the OpenQuake engine implementation of the Frankel et al. (1996) available on github but better support with an illustration of the process to be followed will be necessary.
Support for host-to-target adjustment
Within site specific hazard analyses (see for example Bommer et al., 2014) as well as within regional hazard studies in areas with scarce strong-motion recordings it is common to adjust GMPEs in order to properly take into account regional variations of parameters controlling ground-motion properties such as stress drop, kappa and average shear wave velocity within the uppermost 30 meters.
In future releases of the OpenQuake engine we plan to improve the support for these modifications while maintaining a high as possible the level and quality of testing.
Sigma adjustment, support for homoskedastic sigma
These methods are also commonly adopted within site-specific hazard analyses. These corrections are currently supported by the OpenQuake engine by subclassing a prototype GSIM implementation. A subclass is a copy of an original class; it inherits properties of the original class. Its behavior can be modified by adding new components or by overriding the existing ones. However, this requires programming experience. We therefore plan to offer easier procedures for using these methods with the GSIM implemented.
Spatial cross correlation
The OpenQuake engine already supports the calculation of ground motion fields generated by taking into account the spatial correlation of within event ground motion residuals. We plan to add the possibility of computing cross-correlated ground motion fields in order to better support analyses taking into account distributed infrastructures as well as heterogeneous portfolios of assets.
Near source directivity effects
Some of the recently published NGA West 2 GMPEs (i.e. Chiou and Youngs (2014)) offer the possibility of computing ground motion by taking into account near source directivity effects. We plan to implement this GMPE - as well as the other NGA West 2 GMPEs - into the OpenQuake engine.